We return to our study of harmonic motion as an application of second order linear differential equations, this time considering the cases where damping occurs.
Spring Problems II
Free Vibrations With Damping
In this section we consider the motion of an object in a spring–mass system with damping. We start with unforced motion, so the equation of motion is
Now suppose the object is displaced from equilibrium and given an initial velocity. Intuition suggests that if the damping force is sufficiently weak the resulting motion will be oscillatory, as in the undamped case considered in the previous section, while if it’s sufficiently strong the object may just move slowly toward the equilibrium position without ever reaching it. We’ll now confirm these intuitive ideas mathematically. The characteristic equation of (eq:6.2.1) is The roots of this equation are In Trench 5.2 we saw that the form of the solution of (eq:6.2.1) depends upon whether is positive, negative, or zero. We’ll now consider these three cases.Underdamped Motion
We say the motion is underdamped if . In this case and in (eq:6.2.2) are complex conjugates, which we write as where The general solution of (eq:6.2.1) in this case is By the method used Trench 6.1 to derive the amplitude–phase form of the displacement of an object in simple harmonic motion, we can rewrite this equation as
where The factor in (eq:6.2.3) is called the time–varying amplitude of the motion, the quantity is called the frequency, and (which is the period of the cosine function in (eq:6.2.3) is called the quasi–period. A typical graph of (eq:6.2.3) is shown below.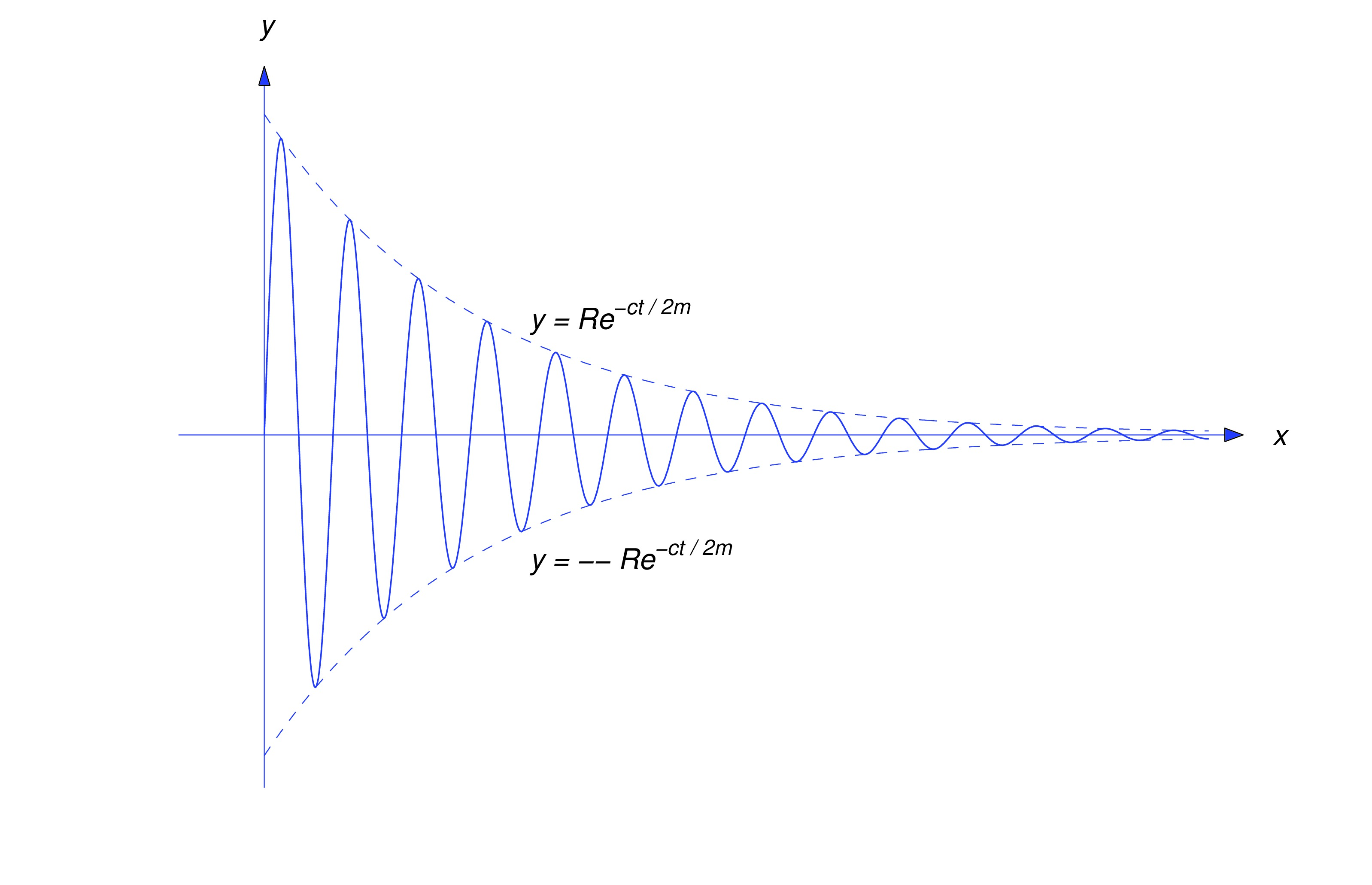
As illustrated in that figure, the graph of oscillates between the dashed exponential curves .
Overdamped Motion
We say the motion is overdamped if . In this case the zeros and of the characteristic polynomial are real, with (see (eq:6.2.2)), and the general solution of (eq:6.2.1) is Again as in the underdamped case, but the motion isn’t oscillatory, since can’t equal zero for more than one value of unless .
Critically Damped Motion
We say the motion is critically damped if . In this case and the general solution of (eq:6.2.1) is
Again and the motion is nonoscillatory, since can’t equal zero for more than one value of unless .
Suppose a 64 lb weight stretches a spring 6 inches in equilibrium and a dashpot
provides a damping force of lb for each ft/sec of velocity.
- (a)
- Write the equation of motion of the object and determine the value of for which the motion is critically damped.
- (b)
- Find the displacement for if the motion is critically damped and the initial conditions are and .
- (c)
- Find the displacement for if the motion is critically damped and the initial conditions are and .
item:6.2.1a Here slugs and lb/ft. Therefore the equation of motion (eq:6.2.1) is
The characteristic equation is
which has roots
Therefore the damping is critical if
item:6.2.1b Setting in (eq:6.2.4) and cancelling the common factor yields The characteristic equation is Hence, the general solution is
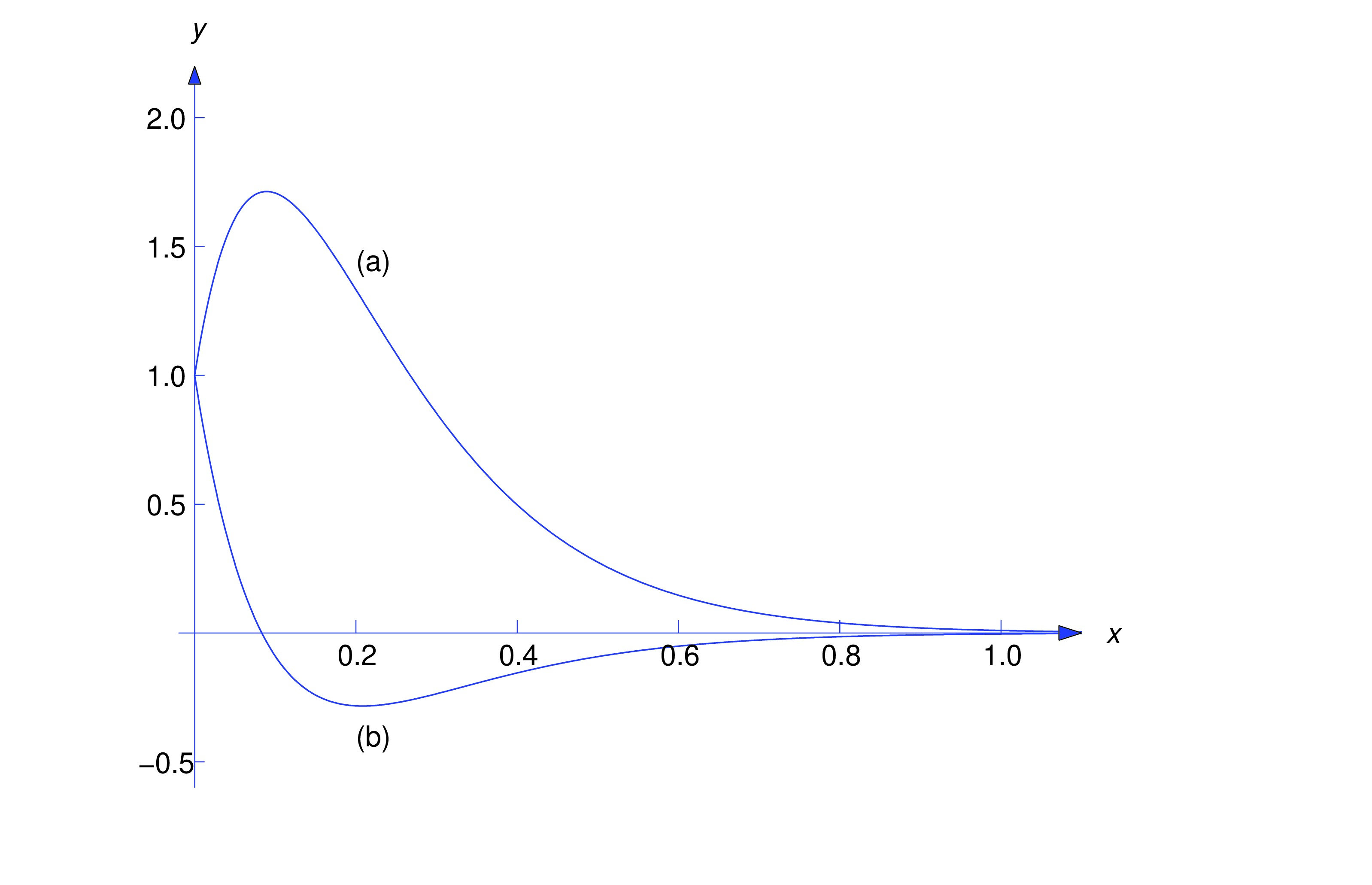
Differentiating this yields Imposing the initial conditions and in the last two equations shows that and . Hence, the solution of the initial value problem is Therefore the object approaches equilibrium from above as . There’s no oscillation.item:6.2.1c Imposing the initial conditions and in (eq:6.2.5) and (eq:6.2.6) yields and . Hence, the solution of this initial value problem is Therefore the object moves downward through equilibrium just once, and then approaches equilibrium from below as . Again, there’s no oscillation. The solutions of these two initial value problems are graphed in the figure below.
Find the displacement of the object in Example example:6.2.1 if the damping constant is
lb–sec/ft and the initial conditions are ft and ft/sec.
With , the equation of motion (eq:6.2.4) becomes
after cancelling the common factor 2. The characteristic equation
has complex conjugate roots
Therefore the motion is underdamped and the general solution of (eq:6.2.7) is
Differentiating this yields
Imposing the initial conditions and in the last two equations yields and . Hence,
the solution of the initial value problem is
The amplitude of the function in parentheses is
Therefore we can rewrite (eq:6.2.8) as
where
Therefore radians.
Let the damping constant in Example 1 be lb–sec/ft. Find the displacement for if
and .
With , the equation of motion (eq:6.2.4) reduces to
after cancelling the common factor 2. The characteristic equation
has the roots and . Therefore the general solution of (eq:6.2.9) is
Differentiating this yields
The last two equations and the initial conditions and imply that
The solution of this system is , . Substituting these into (eq:6.2.10) yields
as the solution of the given initial value problem.
Forced Vibrations With Damping
Now we consider the motion of an object in a spring-mass system with damping, under the influence of a periodic forcing function , so that the equation of motion is
In Trench 6.1 we considered this equation with and found that the resulting displacement assumed arbitrarily large values in the case of resonance (that is, when ). Here we’ll see that in the presence of damping the displacement remains bounded for all , and the initial conditions have little effect on the motion as . In fact, we’ll see that for large the displacement is closely approximated by a function of the form where the amplitude depends upon , , , , and . We’re interested in the following question:Assuming that , , , and are held constant, what value of produces the largest
amplitude in (eq:6.2.12), and what is this largest amplitude?
To answer this question, we must solve (eq:6.2.11) and determine in terms of , and . We can obtain a particular solution of (eq:6.2.11) by the method of undetermined coefficients. Since does not satisfy the complementary equation we can obtain a particular solution of (eq:6.2.11) in the form
Differentiating this yields and From the last three equations, so satisfies (eq:6.2.11) ifSolving for and and substituting the results into (eq:6.2.13) yields which can be written in amplitude–phase form as
whereTo compare this with the undamped forced vibration that we considered in the previous module, it’s useful to write
where is the natural angular frequency of the undamped simple harmonic motion of an object with mass on a spring with constant . Substituting (eq:6.2.16) into (eq:6.2.14) yieldsThe solution of an initial value problem is of the form , where has one of the three forms
The amplitude of in (eq:6.2.17) is
which is finite for all ; that is, the presence of damping precludes the phenomenon of resonance that we encountered in studying undamped vibrations under a periodic forcing function. We’ll now find the value of for which is maximized. This is the value of for which the function in the denominator of (eq:6.2.18) attains its minimum value. By rewriting this as you can see that is a strictly increasing function of if (Recall that ). Therefore if this inequality holds. From (eq:6.2.15), you can see that if . In this case, (eq:6.2.14) reduces to which is consistent with Hooke’s law: if the mass is subjected to a constant force , its displacement should approach a constant such that . Now suppose . Then, from (eq:6.2.19), and is the value of for which the expression in parentheses equals zero; that is, (To see that is the minimum value of , note that if and if .) Substituting in (eq:6.2.18) and simplifying shows that the maximum amplitude is We summarize our results as follows. Suppose we consider the amplitude of the steady state component of the solution
of
as a function of .
Note that and are continuous functions of , for , since (eq:6.2.20) and (eq:6.2.21) reduce to and if
.
- (a)
- If , the maximum amplitude is and it’s attained when .
- (b)
- If , the maximum amplitude is and it’s attained when
Text Source
Trench, William F., ”Elementary Differential Equations” (2013). Faculty Authored and Edited Books & CDs. 8. (CC-BY-NC-SA)