Recall that in a phase space plot, the solution represents the position of a particle on a line for each time . Phase space plots are difficult to draw, since motion must be built into the plot. However, we can view this dynamically in MATLAB using the program pline.
In this discussion, we will only plot solutions of autonomous, first order differential equations; that is, equations of the form To begin, type
plineand the window with the PLINE Setup appears on the computer screen. The layout is essentially the same as in the DFIELD5 Setup described above. However, there are two differences:
- (a)
- Since we assume that our equation is autonomous, the time variable — the independent variable — does not appear explicitly and no time interval is specified. Rather the Integration time, the period for which the solution is to be computed, has to be declared. This change is due to the convention that all numerical computations start at .
- (b)
- We may enter equations with one free parameter. In the PLINE Setup that parameter is lambda. Moreover, we may choose the value for that parameter. The default value in the PLINE Setup is . Hence, the default equation used by pline is equation (??) with .
When we click with the left mouse button onto the button Proceed, then the display window with the title PLINE Display opens and the -axis shown in Figure ?? becomes visible.
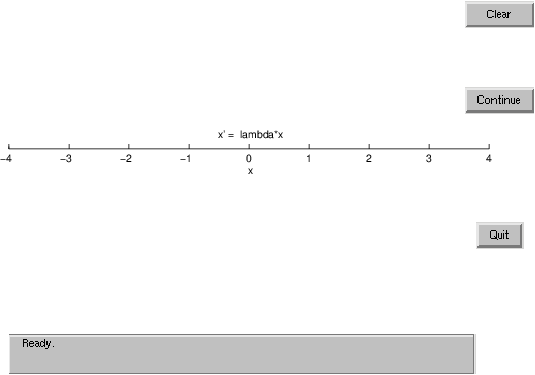
Similar to dfield5 we may start the numerical solution by clicking with the left mouse button on the initial value of . It is not necessary to hit the axis precisely. For example, when we click (approximately) on , a colored disk becomes visible and moves to the left until it stops at a value for that is between and . This value can be read at the bottom of the window from the message Endpoint: 0.05…. We can also enter the initial point by choosing the option Keyboard input from the PLINE Options menu. In fact, if we enter in that window and click on Compute, then the corresponding solution is computed and we obtain the message Endpoint: 0.05495. Sometimes it helps to clear all markers in the display window; this is accomplished by clicking on Clear.
Equilibria and Dynamics
The simplest solution to a differential equation is a solution that remains constant for all time. Such solutions are called equilibria. Equilibria are found as follows:
- Proof
- Suppose that is an equilibrium solution to (??). Then , since . Conversely, suppose . Then is a solution to (??).
We now return to pline and the autonomous equation . If we continue the integration by pushing Continue in the display window we see again that the solution approaches as goes to infinity; that is, the solution approaches the equilibrium given by . Correspondingly, the point that indicates the position of in the display window does not move any more. Solutions that have initial conditions near either tend towards when or away from when .
An equilibrium is asymptotically stable if all solutions with initial condition near have the limit as goes to infinity. In symbols we require (The definition of asymptotic stability is more complicated in higher dimensions.) The equilibrium is unstable if trajectories starting near move away from . Thus, in our example, the equilibrium is asymptotically stable when and unstable when .
The dynamical behavior of autonomous differential equations of the form (??) is essentially determined by the equilibria of . We explore this statement by using pline to analyze the dynamical behavior of the ordinary differential equation
where is a constant.First, enter this equation by editing the upper box in the PLINE Setup window. Do
this editing by clicking in the window and deleting the default equation and then
type x*(lambda-x 2). Then change the minimum and maximum values of from and
to and . Finally, change the integration time to and the value of lambda to
.
2). Then change the minimum and maximum values of from and
to and . Finally, change the integration time to and the value of lambda to
.
Second, push on Proceed so that the axis becomes visible in the display window. On integrating the system, we find that solutions seem to behave in a similar way to the solutions of (??) for : all the solutions approach zero as goes to infinity. Indeed, we can see that is an equilibrium solution of (??) for all values of . When numerical exploration suggests that is an asymptotically stable equilibrium.
We now explore the stability properties of when . We begin by changing the value of to . We do this in the setup window and afterwards we confirm the change by pushing Proceed. If we now compute solutions of the differential equation, then we see that they come to a rest at if we start with a positive value for whereas they approach if we start with a negative value for . Even if we begin the numerical computation very close to , the solutions tend to either or . These calculations indicate that is an unstable equilibrium while both and are stable equilibria of (??) when .
We use the Keyboard input to check that or are equilibrium solutions. Start the computations with initial values or and see that the solutions remain constant in time. Alternatively, solve the equation to see that are all equilibria of (??) when .
Our numerical computations indicate that changing the value of from to changes the stability property of the equilibrium .
We can now discuss a method for completely determining the dynamics of a single autonomous differential equation (??) — assuming that equilibria are isolated.
- Determine all equilibria of (??) by solving the equation .
- Choose an initial point between each pair of consecutive equilibria and determine the direction of motion (sign of ) at that initial point. This can be done either directly or by using pline.
- On a line plot the equilibria and connect them by arrows indicating the direction of the dynamics.
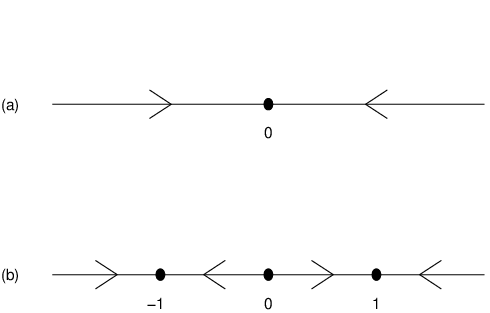
For example, the dynamics of the differential equations and are shown schematically in Figure ??.
Hyperbolic Equilibria
Suppose that is an equilibrium for (??); that is suppose . We denote the derivative of with respect to , , by . The equilibrium is hyperbolic if . Assume that is a hyperbolic equilibrium and use the tangent line approximation to near () and that fact that to conclude that It follows that if , then is negative when and positive when . So when , solutions of (??) starting just to the right of will move left () and tend towards and solutions starting just to the left of will move right () and tend towards . Similarly, if , then is positive when and negative when . Thus, solutions near will tend away from when . We have shown:
It follows from Theorem ?? that the phase line picture near a hyperbolic equilibrium is particularly simple as the arrows beside that equilibrium either both point towards the equilibrium (as in Figure ??(a)) or both point away from the equilibrium (as near in Figure ??(b)).
Comparing Phase Lines and Time Series
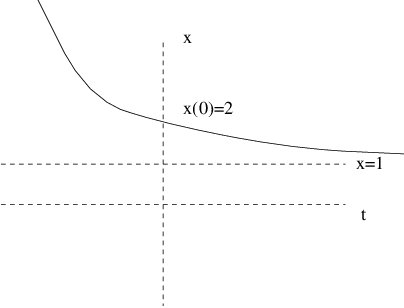
Phase line plots and time series graphs give different ways of presenting the same information. With that point in mind, it is important to be able to recreate one type of plot from the other. For example, let be the solution to the differential equation with initial condition . In Figure ??(b) we have drawn the schematic phase line for all solutions to this differential equation. How can we reconstruct a (schematic) graph of the time series for this solution just from the phase line?
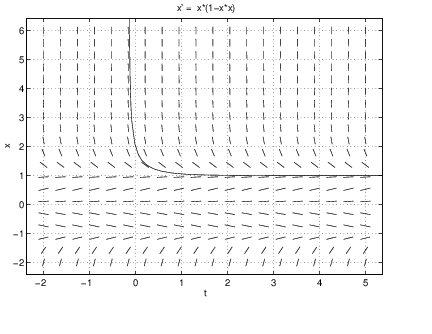
To answer this question, note that in Figure ??(b) the initial condition lies to the right of all equilibria of this equation, and the arrow indicates that solution trajectories starting in this area move to the left, that is, they decrease to the equilibrium at . It follows that Since there are no equilibria to the right of , the graph of must increase to infinity in backwards time. So the graph of is decreasing and asymptotic to for large positive . A schematic graph is given in Figure ??(a). Using dfield5 we can check this description by numerically integrating the differential equation. This graph is shown in Figure ??(b).
Exercises
In Exercises ?? – ?? compute the equilibria of the given differential equation, determine whether these equilibria are asymptotically stable or unstable, and draw a schematic of the dynamics of this equation like the one in Figure ??. You may use pline to check your answer.
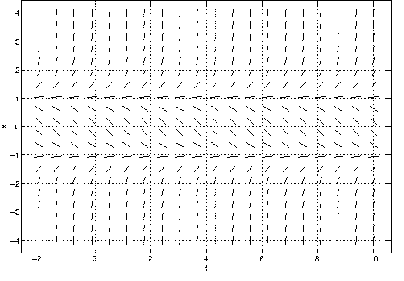
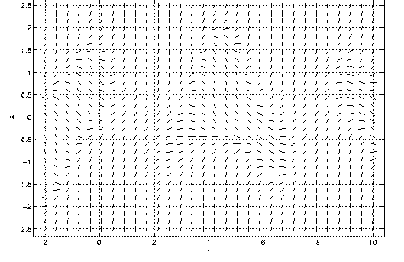
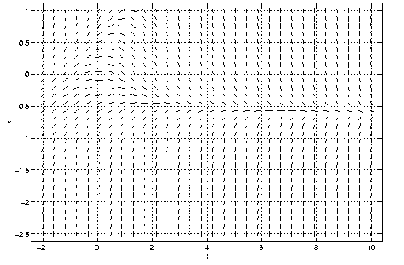
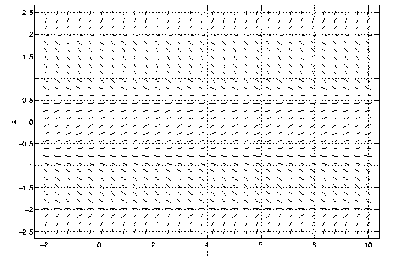
In Exercises ?? – ?? use the line field given in Figure ?? to answer the
following:
(a) Is the differential equation that was used to draw this figure autonomous or
nonautonomous.
(b) If the differential equation is autonomous, then draw the phase line noting the
values of where equilibria occur and whether they are asymptotically stable or not. If
the differential equation is nonautonomous, then draw the time series for solutions
with initial conditions and .