A linear constant coefficient system is not hyperbolic when either has a zero eigenvalue () or when has purely imaginary eigenvalues ( and ). These special cases are indicated by bold lines in Figure ??.
There are four types of nonhyperbolic planar systems. There are:
- (a)
- the center — nonzero purely imaginary eigenvalues,
- (b)
- the saddle-node — a single zero eigenvalue,
- (c)
- the shear — a double zero eigenvalue; one independent eigenvector, and
- (d)
- the zero matrix itself.
The dynamics in the last case are very easy to describe — all solutions are equilibria and solutions remain at the initial point for all time.
Centers
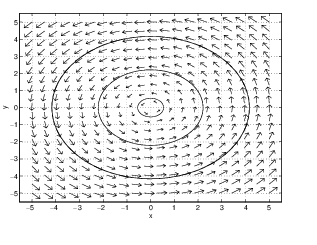
There is a new kind of solution that occurs only in centers — the time periodic solution — as we now explain. In Chapter ??, Theorem ?? we showed that when the matrix has purely eigenvalues with , then is similar to the matrix In Table ??(b) we showed that solutions to are where is the vector of initial conditions and is a rotation matrix (recall (??) of Chapter ??).
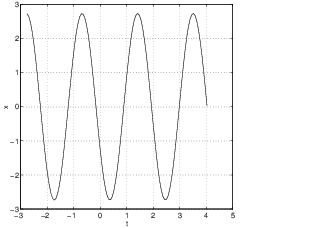
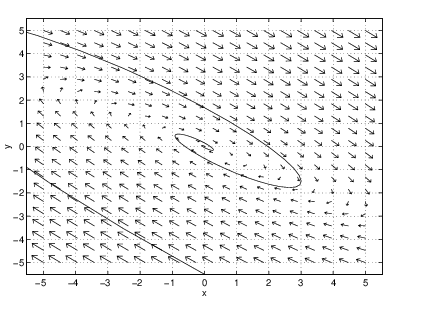
Note that every solution to traverses a circle around the origin as rotates the plane counterclockwise through the angle . As an example, we graph a solution to and its time series in Figure ?? when . All centers have nonzero trajectories that are either ellipses or circles, and those centers that do not have the form of typically produce ellipses as solutions. See Exercise ??.
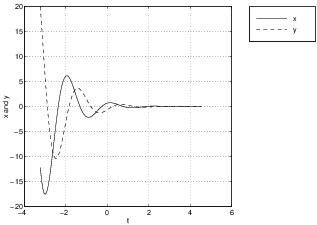
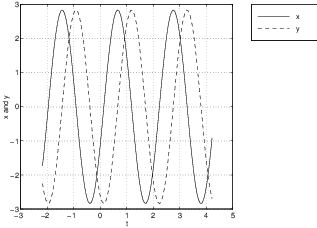
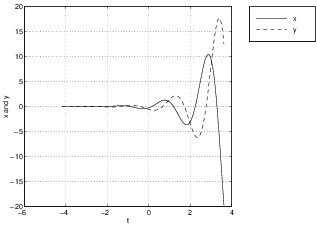
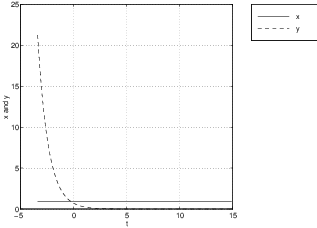
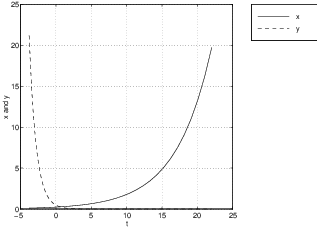
It is instructive to see how solutions change when the real part of the eigenvalue traverses through zero. Suppose that has eigenvalues and is in normal form We illustrate this change by graphing the time series (of both and versus ) in Figure ?? with and , respectively. Note that when the time series oscillate about zero but also damp down to zero, while when the time series oscillate and diverge. When , there is an exact balance leading to time periodic solutions.
Saddle Nodes
When the determinant of a matrix is zero, then must have a zero eigenvalue. The simplest way for to be zero is for to have a single zero eigenvalue. In this case we call the origin a saddle node.
So the eigenvalues of a saddle node are and . For simplicity of discussion, we assume that . Let and be the associated eigenvectors. Since , it follows that saddle nodes have a line of equilibria for every scalar .
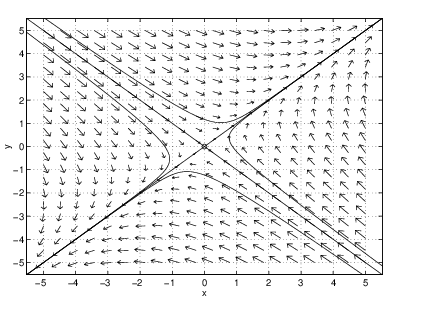
There is also a solution that converges to the origin in forward time (since ). The general solution to this system is for scalars and . Since this solution converges on the equilibrium in forward time. Moreover, the trajectory for any solution stays for all time on the line parallel to the vector . The phase portrait for the system
is shown in Figure ?? (left) along with the time series of a solution (right). Note how the time series (of versus ) asymptotes onto the coordinate of an equilibrium.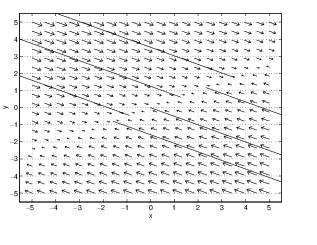
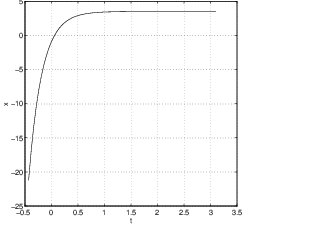
The saddle-node is a nonhyperbolic equilibrium that sits between the hyperbolic saddle and the hyperbolic node (either the nodal sink or the nodal source), just as the center sits between the hyperbolic spiral source and the hyperbolic spiral sink. To illustrate this point we show three time series in Figure ?? for the system
when , , and . See how the time series decays exponentially to zero in forward time in each case. But the time series converges to zero when and grows exponentially when . Finally, when the time series is constant.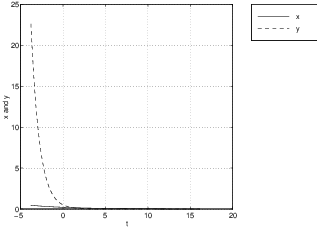
Shears
The last example of a nonhyperbolic system occurs when the matrix has two zero eigenvalues — but only one linearly independent eigenvector. In this case we call the origin a shear. After a similarity transformation such a system is
The solution is Thus solutions move along lines parallel to the axis through the point with speed . These trajectories move to the right when and to the left when .Exercises
In Exercises ?? – ??, find a matrix so that the differential equation satisfies the given condition.
- As a first order system this equation is: Sketch the phase portrait of this equation.
- The damped spring equation, written as a first order system, is:
where is the damping. Sketch the phase portrait of this equation.
In Exercises ?? – ??, consider the four pictures in Figure ??. Each picture is a phase portrait of a system of differential equations where is a matrix. Answer the given question for each of these phase portraits.
In Exercises ?? – ??, consider the system of differential equations where is the given matrix. For each system determine whether the origin is hyperbolic or not and the type of equilibrium at the origin (spiral sink, center, etc.).