A second order constant coefficient homogeneous differential equation is a differential equation of the form:
where and are real numbers.Newton’s Second Law
Newton’s second law of motion is a second order ordinary differential equation, and for this reason second order equations arise naturally in mechanical systems. Newton’s second law states that
where is force, is mass, and is acceleration.Newton’s Second Law and Particle Motion on a Line
For a point mass moving along a line, (??) is
where is the position of the point mass at time . For example, suppose that a particle of mass is falling towards the earth. If we let be the gravitational constant and if we ignore all forces except gravitation, then the force acting on that particle is . In this case Newton’s second law leads to the second order ordinary differential equationNewton’s Second Law and the Motion of a Spring
As a second example, consider the spring model pictured in Figure ??. Assume that the spring has zero mass and that an object of mass is attached to the end of the spring. Let be the natural length of the spring, and let measure the distance that the spring is extended (or compressed). It follows from Newton’s Law that (??) is satisfied. Hooke’s law states that the force acting on a spring is where is a positive constant. If the spring is damped by sliding friction, then where is also a positive constant. Suppose, in addition, that an external force also acts on the mass and that that force is time-dependent. Then the entire force acting on the mass is By Newton’s second law, the motion of the mass is described by
which is again a second order ordinary differential equation.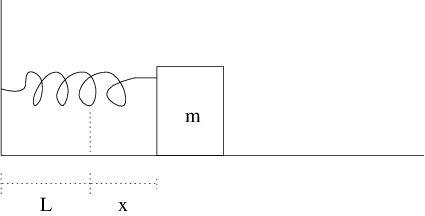
A Reduction to a First Order System
There is a simple trick that reduces a single linear second order differential equation to a system of two linear first order equations. For example, consider the linear homogeneous ordinary differential equation (??). To reduce this second order equation to a first order system, just set . Then (??) becomes It follows that if is a solution to (??) and , then is a solution to
We can rewrite (??) as where Note that if is a solution to (??), then is a solution to (??). Thus solving the single second order linear equation is exactly the same as solving the corresponding first order linear system.The Initial Value Problem
To solve the homogeneous system (??) we need to specify two initial conditions . It follows that to solve the single second order equation we need to specify two initial conditions and ; that is, we need to specify both initial position and initial velocity.
The General Solution
There are two ways in which we can solve the second order homogeneous equation (??). First, we know how to solve the system (??) by finding the eigenvalues and eigenvectors of the coefficient matrix in (??). Second, we know from the general theory of planar systems that solutions will have the form for some scalar . We need only determine the values of for which we get solutions to (??).
We now discuss the second approach. Suppose that is a solution to (??). Substituting this form of in (??) yields the equation So is a solution to (??) precisely when , where
is the characteristic polynomial of the matrix in (??).Suppose that and are distinct real roots of . Then the general solution to (??) is where .
An Example with Distinct Real Eigenvalues
For example, solve the initial value problem
with initial conditions and . The characteristic polynomial is whose roots are and . So the general solution to (??) is To find the precise solution we need to solve So , , and the solution to the initial value problem for (??) isAn Example with Complex Conjugate Eigenvalues
Consider the differential equation
The roots of the characteristic polynomial associated to (??) are and . It follows from the discussion in the previous section that the general solution to (??) is where and are complex scalars. Indeed, we can rewrite this solution in real form (using Euler’s formula) as for real scalars and .In general, if the roots of the characteristic polynomial are , then the general solution to the differential equation is:
An Example with Multiple Eigenvalues
Note that the coefficient matrix of the associated first order system in (??) is never a multiple of . It follows from the previous section that when the roots of the characteristic polynomial are real and equal, the general solution has the form
Summary
It follows from this discussion that solutions to second order homogeneous linear equations are either a linear combination of two exponentials (real unequal eigenvalues), times one exponential (real equal eigenvalues), or a time periodic function times an exponential (complex eigenvalues).
In particular, if the real part of the complex eigenvalues is zero, then the solution is time periodic. The frequency of this periodic solution is often called the internal frequency, a point that is made more clearly in the next example.
Solving the Spring Equation
Consider the equation for the frictionless spring without external forcing. From (??) we get
where . The roots are and . So the general solution is where . Under these assumptions the motion of the spring is time periodic with period or internal frequency . In particular, the solution satisfying initial conditions and (the spring is extended one unit in distance and released with no initial velocity) is The graph of this function when is given on the left in Figure ??.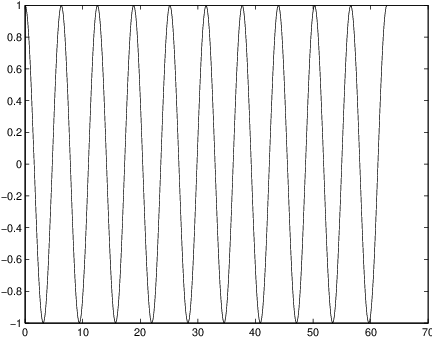
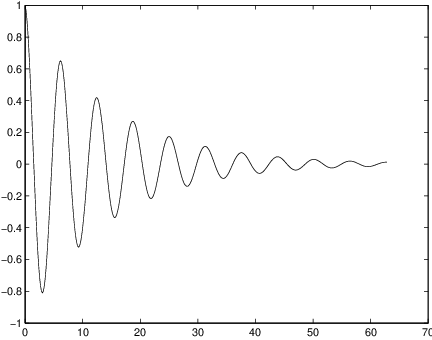
If a small amount of friction is added, then the spring equation is where is small. Since the eigenvalues of the characteristic polynomial are where the general solution is Since , these solutions oscillate but damp down to zero. In particular, the solution satisfying initial conditions and is The graph of this solution when and is given in Figure ?? (right). Compare the solutions for the undamped and damped springs.
Exercises
In Exercises ?? – ?? find the general solution to the given differential equation.
In Exercises ?? – ??, let be a solution to the second order linear homogeneous differential equation (??). Determine whether the given statement is true or false.