In this section we describe phase portraits and time series of solutions for different kinds of sinks. Sinks have coefficient matrices whose eigenvalues have negative real part. There are four types of sinks:
- (a)
- spiral sink — complex eigenvalues,
- (b)
- nodal sink — real unequal eigenvalues,
- (c)
- focus sink — real equal eigenvalues; two independent eigenvectors, and
- (d)
- improper nodal sink — real equal eigenvalues; one independent eigenvector.
In the previous section we showed that all solutions of sinks tend toward the origin in forward time. The way in which these solutions approach the origin distinguishes the different sink types. See Figure ??. We discuss each type of sink in turn, noting that spiral and nodal sinks are the ones that are most likely to occur.
Spiral Sinks
When the eigenvalues are complex conjugates (that is, when the coefficient matrix has no real eigenvectors), solutions spiral into the origin. This behavior can be seen from the explicit solution (??) in Chapter ??. In particular, after a similarity transformation, solutions have the form where are the eigenvalues of the matrix of the linear system. Since the real parts of the eigenvalues are assumed to be negative, . Thus the initial vector is rotated at constant speed and contracted exponentially at rate , and the resulting trajectory forms a spiral.
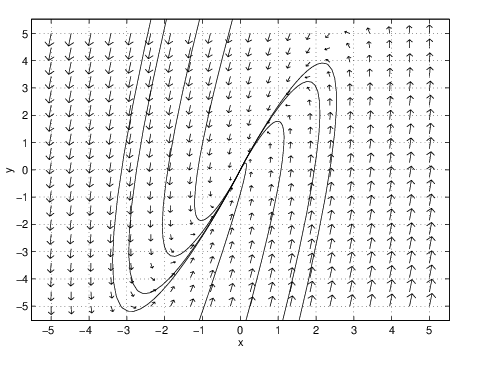
Using pplane5, we compute a typical phase portrait. Load the system
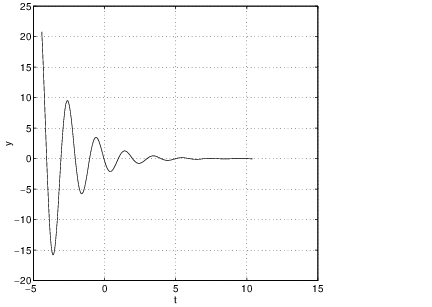
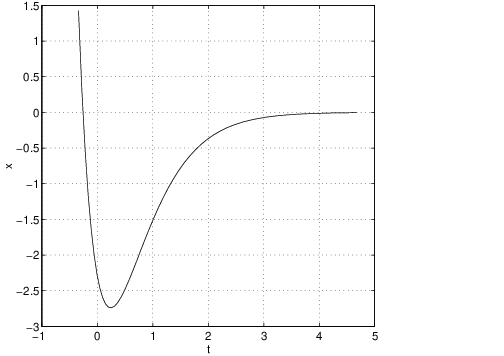
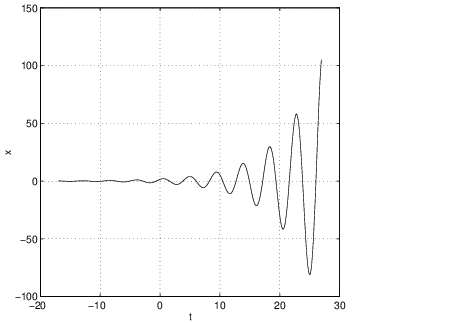
into pplane5 and compute a trajectory. The result should be similar to Figure ?? (left). Note that there is no visible sign of an eigendirection in this figure. Indeed, the important feature of this phase portrait is the spiraling nature of trajectories approaching the origin. This geometric feature is typical of systems whose coefficient matrices have complex eigenvalues. In the time series, Figure ?? (right), note how the spiraling is realized as a damped oscillation.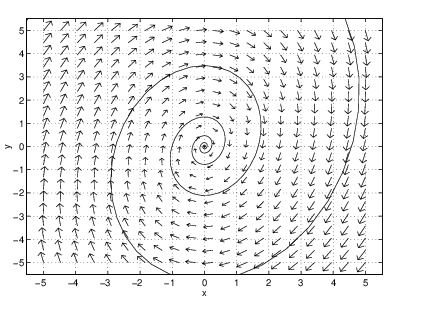
Nodal Sinks
When the eigenvalues are real and unequal, we get a nodal sink. For example, consider the differential equation
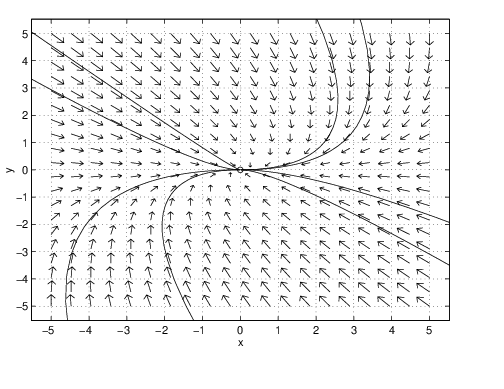
Moreover, suppose that the eigenvalues are . Then all trajectories approach the origin in forward time tangent to the eigendirection associated with the eigenvalue . To verify this point, let and be the associated eigenvectors. Then, the general solution has the form Since , in forward time approaches , which is tangent to the eigendirection. The eigenvalues in our example are and , and the eigenvector is just . Indeed, note how trajectories in the phase plane Figure ?? (left) approach the origin tangent to the -axis.
Improper Nodes
There are two types of sinks that correspond to coefficient matrices with real equal eigenvalues: those with one independent eigenvector — an improper node — and those with two independent eigenvectors — a focus.
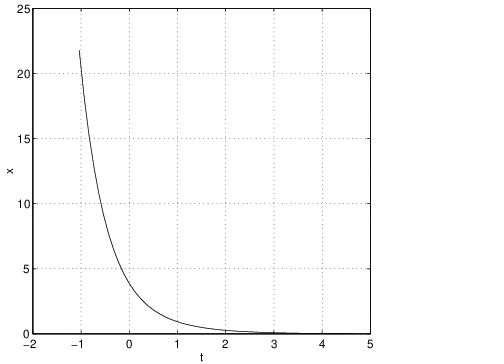
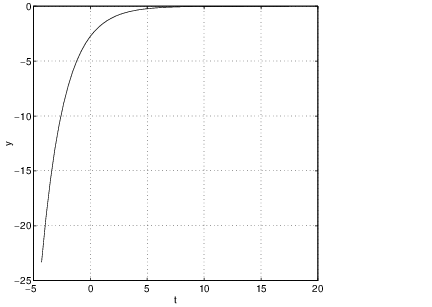
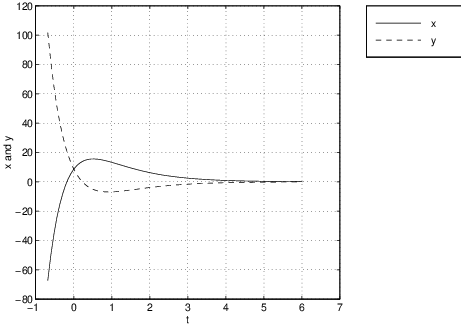
The phase plane of an improper node looks like the one pictured in Figure ?? (left) along with the time series of one of the solution trajectories (right). The equation that we use in this figure is (??). Note that trajectories approach the origin tangent to a single line — the line generated by the eigenvector. In this example, the eigenvector is approximately which generates a line through the origin of slope approximately equal to .
Compare the time series of a solution to an improper nodal sink with either the time series of the spiral sink solution given in Figure ?? (right) or the nodal sink given in Figure ?? (right). Note how there is an initial excursion away from zero followed by a simple asymptote to zero. This excursion away from zero is typical of nodal sinks. To verify this point, let be the eigenvalue of the coefficient matrix . Then the general solution to this equation is: where . The initial growth in the solution is forced by the term. Eventually, however, exponential decay dominates and the solution approaches zero.
In addition, solutions approach zero in forward time tangent to the eigendirection spanned by the eigenvector . If we choose a generalized eigenvector so that , then we can write the general solution as For large , the solution direction is dominated by , and the trajectory is tangent to the eigendirection, as claimed.
Focuses
When the real equal eigenvalues correspond to a coefficient matrix having two independent eigenvectors, we have a focus. Lemma ?? of Chapter ?? states that for a focus, the matrix must be a multiple of ; an example of a focus is the system of differential equations
The closed form solution to (??) is just So solutions remain on straight lines for all time. The phase plane for this equation is pictured in Figure ?? (left), confirming that solutions stay on lines through the origin. Algebraically, the reason for this behavior is that every line through the origin is an eigendirection. There are an infinite number of eigendirections even though there are only two independent eigenvectors.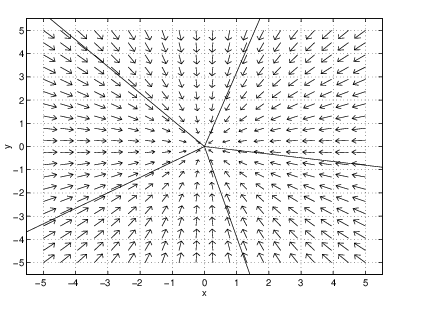
Hyperbolic Systems
The simplest linear systems are the sinks, sources, and saddles. These linear systems all have eigenvalues that are neither zero nor purely imaginary. We call the linear system hyperbolic when all eigenvalues of have nonzero real parts.
Our discussion of phase portraits of hyperbolic linear systems is summarized in Table ??. There we reinforce the observation that the type of phase portrait is determined completely by the eigenvalues and eigenvectors of the coefficient matrix of the linear system.
| NAME | EIGENVALUES |
| saddle | real and of opposite sign |
| spiral sink | complex with negative real part |
| spiral source | complex with positive real part |
| nodal sink | real, unequal, and negative |
| nodal source | real, unequal, and positive |
| improper nodal sink | real, equal, negative, and one eigenvector |
| improper nodal source | real, equal, positive, and one eigenvector |
| focus sink | real, equal, negative, and two independent eigenvectors |
| focus source | real, equal, positive, and two independent eigenvectors |
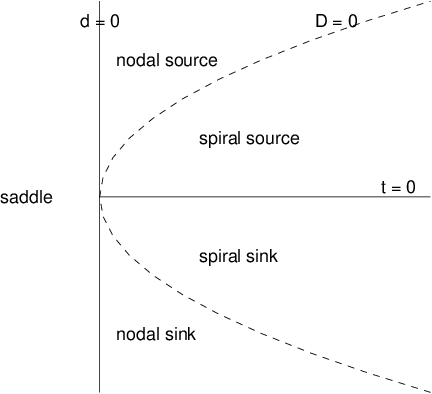
Another way to determine the type of phase portrait for the hyperbolic linear system is through the determinant, trace and discriminant of . This determination can be made by answering the following four questions in order.
- What is the determinant of ?
- What is the trace of ?
- What is the discriminant of ?
- Is a multiple of ?
We now verify that the answers to these four questions do indeed determine the phase portraits of hyperbolic linear systems. Recall from (??) that the determinant is the product of the eigenvalues. So if the determinant is negative, then must have one negative eigenvalue and one positive eigenvalue, and the origin is a saddle. It also follows that has a zero eigenvalue when , which contradicts hyperbolicity. When either has two real eigenvalues of the same sign or a complex conjugate pair of eigenvalues.
Next recall from (??) of Section ?? that the trace is the sum of the eigenvalues. Suppose the trace of is negative. If the eigenvalues of are real, then the two eigenvalues must be negative since they have the same sign, and the origin is a sink. If the eigenvalues are a complex conjugate pair, then the trace is twice the real part of the eigenvalues. So again the origin is a sink. A similar discussion verifies that the origin is a source when the trace of is positive. Note that and implies that has purely imaginary eigenvalues which contradicts the hyperbolicity of .
To understand the conclusions of question (Q3) recall from Theorem ?? of Chapter ?? that the eigenvalues of are complex conjugates when the discriminant is negative. Hence the origin is a spiral. Similarly, if , then the eigenvalues of are real, and the origin is a node. Finally, if , then the eigenvalues of are real and equal. The origin is an improper node when there is only one linearly independent eigenvector, and the origin is a focus when there are two linearly independent eigenvectors. Moreover, when a matrix has two equal eigenvalues and two linearly independent eigenvectors, it is a multiple of .
See Figure ?? for a classification of phase portrait types in the determinant-trace plane.
Exercises
In Exercises ?? – ??, find a matrix so that the given statement is satisfied.
In Exercises ?? – ??, use pplane5 to determine the type of phase portrait for the systems of differential equations where is the given matrix. Based on these computations answer the following questions:
- Is the origin asymptotically stable?
- How many real eigenvectors does the matrix have?