Back in single variable Calculus, we were able to use the second derivative to get information about a function. For instance, the second derivative gave us valuable information about the shape of the graph. More specifically, we could use the second derivative to determine the concavity.
- If on an interval, then the graph of is concave up on that interval.
- If on an interval, then the graph of is concave down on that interval.
- If changes signs at a point, then the graph of has an inflection point at that point.
Furthermore, we were able to use second derivative in conjunction with roots of the first derivative to find local maxima and minima. We could also think about the second derivative as the rate-of-change of a rate-of-change, or describing some sort of acceleration or deceleration.
Since the second derivative contains so much useful information, we would like to come up with a way to define second derivatives for multivariable functions! At first, this might seem simple: just take the derivative of the derivative. But when we took the total derivative of a multivariable function , we got a matrix of partial derivatives, and it’s not at all clear how we would differentiate a matrix.
For now, we’ll settle for defining second order partial derivatives, and we’ll have to wait until later in the course to define more general second order derivatives. Fortunately, second order partial derivatives work exactly like you’d expect: you simply take the partial derivative of a partial derivative.
Higher Order Partials
Consider the function . We’ll start by computing the first order partial derivatives of ,
with respect to and .
We can then compute the second order partial derivatives and by differentiating with respect to again, and with respect to again.
However, this isn’t the only way that we could take second order partial derivatives! We could differentiate with respect to first, and with respect to second, to get . We could also differentiate with respect to first, and with respect to second, to get .
Notice that we got the same result for and , so it didn’t end up mattering what order we took these derivatives in. In turns out that this is not a coincidence, and it’s a consequence of Clairaut’s Theorem, which we’ll talk about in the next section.
There are a few different ways that we can denote second order partials. We can denote the second order partial of that we get by differentiating with respect to twice as any of the following. For the second order partial of that we get by differentiating with respect to first, then differentiating with respect to , we denote this as below. To remember what order to take these derivatives for all of these notations, start with the variable closest to , and work your way out.
We can similarly define and compute third order partials, fourth order partials, and so on.
Clairaut’s Theorem
In previous examples, we’ve seen that it doesn’t matter what order you use to take higher order partial derivatives, you seem to wind up with the same answer no matter what. This isn’t an amazing coincidence where we randomly chose functions that happened to have this property; this turns out to be true for many functions. Clairaut’s Theorem gives us this result.
(Clairaut’s Theorem) Suppose we have a function . Suppose further that all of the
second order mixed partial derivatives of exist and are continuous on an open disc
around . Then, for any and ,
We have a similar result for even higher order partial derivatives. Before we state that result, we’ll introduce a new definition to make it easier to describe how “nice” functions are.
A function is of class if all of the partial derivatives of up to and including the th
order exist and are continuous.
If is of class for all , then we say is of class .
If is continuous, we say is of class .
We’ll often write this as and say “ is three,” for example, if is of class .
We can generalize Clairaut’s Theorem to th order derivatives for functions.
For example, if is , we have
Geometric Significance
Remembering back to single variable calculus, we could use the first and second derivatives of a function to figure out the shape of the graph.
More precisely, we used the first derivative to determine where a function was increasing and where it was decreasing. If on some interval, then is increasing on that interval. If on some interval, then is decreasing on that interval.

We used the second derivative to determine the concavity of a function. If on an interval, then is concave up on that interval. If on an interval, then is concave down on that interval.

Partial derivatives can give us similar information about the graph of a multivariable function, although the situation is a bit more nuanced. Let’s consider a function , so we can visualize its graph. We’ve already seen that the partial derivative with respect to tells us how changes as changes.
More specifically, suppose for in some open interval containing . Then is increasing as we move in the positive -direction from the point .
In the graph below, we can see that is positive near the point , since the function increases as we move in the positive direction.
_
Similarly, suppose for in some open interval constaining . Then is increasing as we move in the positive -direction from the point .
In the graph below, we can see that is negative near the point , since the function increases as we move in the positive direction.
_
Suppose for in some open interval constaining . Then is constant as we move in the positive -direction from the point .
In the graph below, we can see that is zero near the point , since the function is constant as we move in the positive direction.
_
It’s also possible for to be zero at only an isolated point. In this case, the graph instantaneously flattens out in the -direction. In the graph below, is zero at the point .
_
The partial derivative with respect to , , can tell us where is increasing, decreasing, or constant as we move in the positive direction.
Now, let’s look at what the second-order partial derivatives tell us about the graph of the function . It shouldn’t be too surprising that the sign of tells us about the concavity of as we move in the positive direction.
In the graph below, is positive at all points .
Similarly, the sign of tells us about the concavity of as we move in the positive direction. In the graph above, is negative at all points .
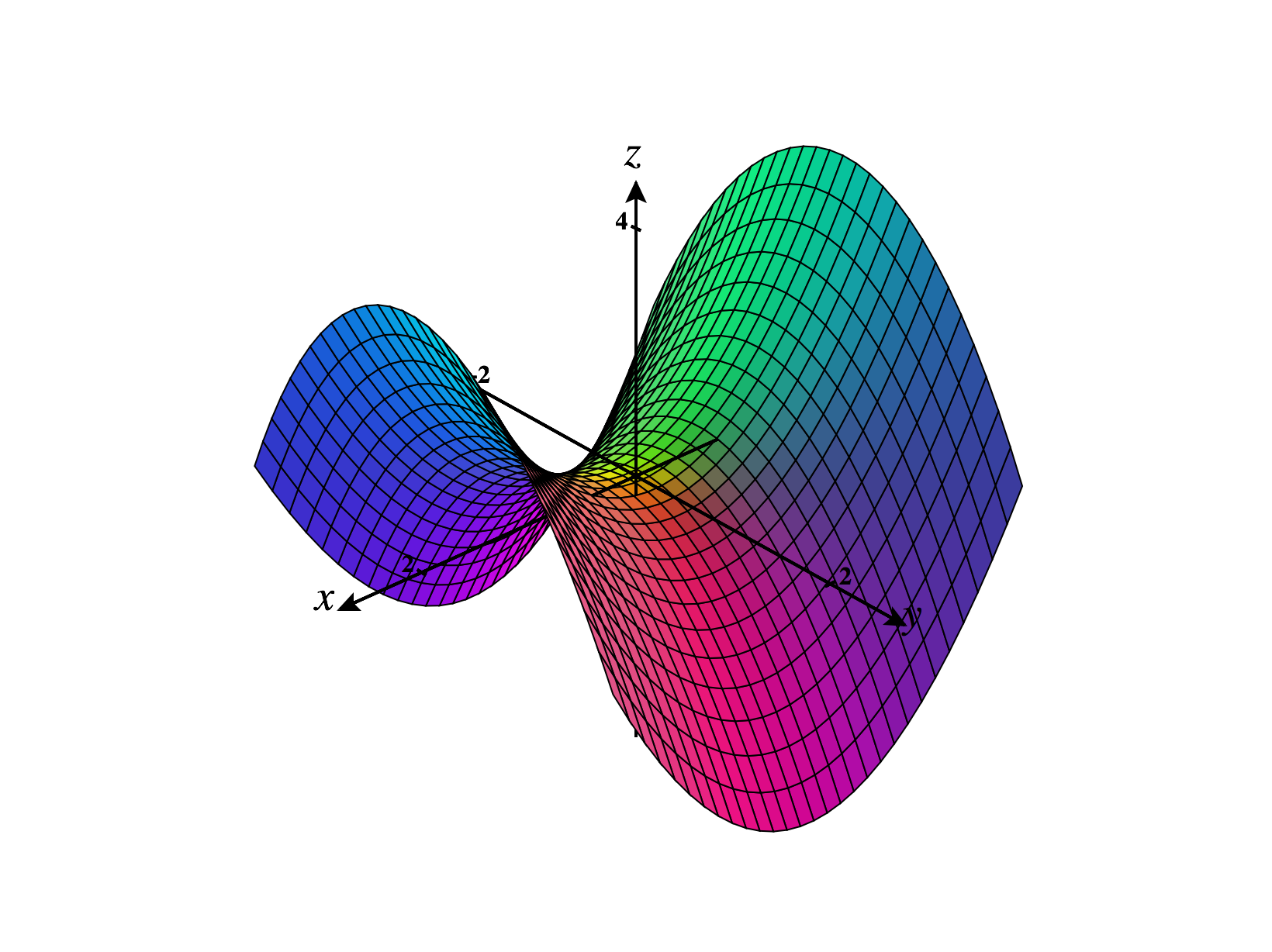
But what do the mixed partials, and , tell us about the graph of ? Let’s consider , which is the partial derivative of with respect to . The partial derivative tells us the rate of change of as we move in the positive direction. Then, the partial derivative of with respect to tells us how changes as we move in the positive direction. That is, we look at how the rate of change in the direction changes as we move in the direction. This is a lot to unravel!
In the graph below, we can see that the slope in the direction is increasing as we move in the positive direction, so is positive.
_
We can similarly think of as the change in as we move in the positive direction.
_
By Clairaut’s theorem, for “nice” functions we’ll always have . This mixed partial tells us about how the graph of is “twisted.”