We’ve dealt with several ways to describe curves in :
- As the graph of a function. For example, .
- As the set of points satisfying an equation. For example, the points such that .
- As the set of points satisfying an equation in another coordinate system. For example, in polar coordinates.
Another way that we can describe a curve is using parametric equations. When describing a curve using parametric equations, we define and in terms of a third variable, often , called the parameter. We often think about as representing time, and imagine the curve being drawn out as increases. This gives us another way to describe curves in , and potentially describe some new and strange curves.
We can describe the unit circle in with the parametric equations
for .
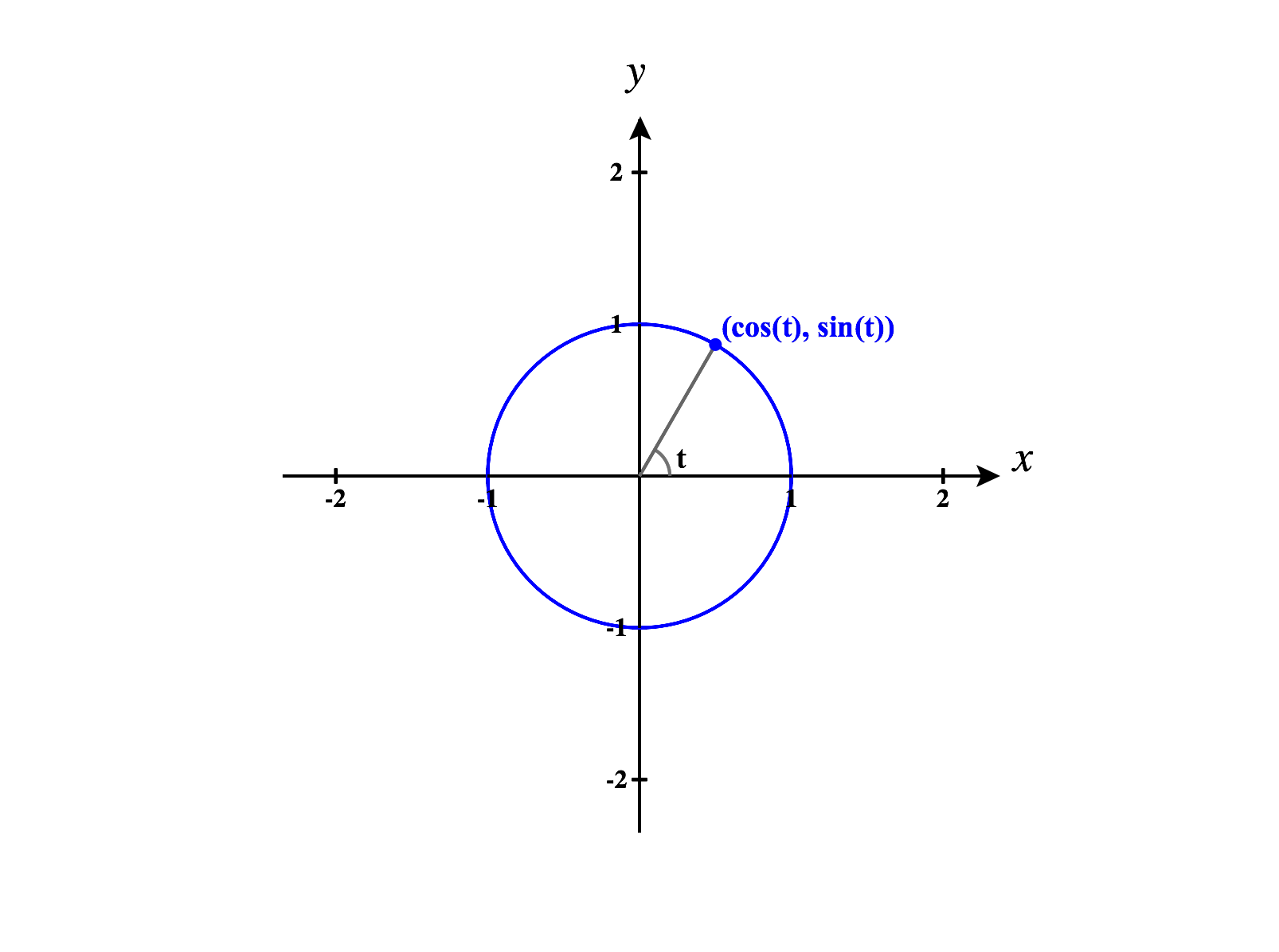
We can think of as giving the angle that a point makes with the positive axis. It can also be helpful to imagine as representing time, and the parametric equations tracing out the circle as time passes.
Consider the parametric equations for the unit circle in :
for .
We can combine these equations into a single vector,
We can visualize the vectors tracing out the unit circle as goes from to .
Notice that we are blurring the distinction between vectors and points. Although we can think of as a position vector, we would more commonly think of as a point on a curve. Although this might seem a bit sloppy, it will prove very useful throughout the course. Although intuitively we might prefer to use points, a lot of the computations tools that we’ll require are more appropriately used with vectors.
We have defined a function from the interval to , and this idea provides the motivation behind our definition for paths.
Parametric Curves in
This is also called a parametrized curve or parametric curve. When we wish to emphasize that is a vector, we’ll call it the position vector.
We’ll focus on the cases and in this course.
We defined a path as a continuous function, however, we haven’t said what it means for a multivariable function to be continuous. We’ll come back to this later, and we’ll give a rigorous definition for continuity. For now, this should fit with your intuition: you can draw the path without lifting your pencil from the paper.
Sometimes we care more about the image of a path than how the path is drawn out, and then we refer to a curve.
In this case, we say that is a parametrization for the curve .
The difference between a curve and a path is largely a matter of perspective: when working with a curve, we pay attention to what is drawn; when working with a path, we care about how it is drawn.
Consider again the unit circle in . Which of the following are parametrizations for ?
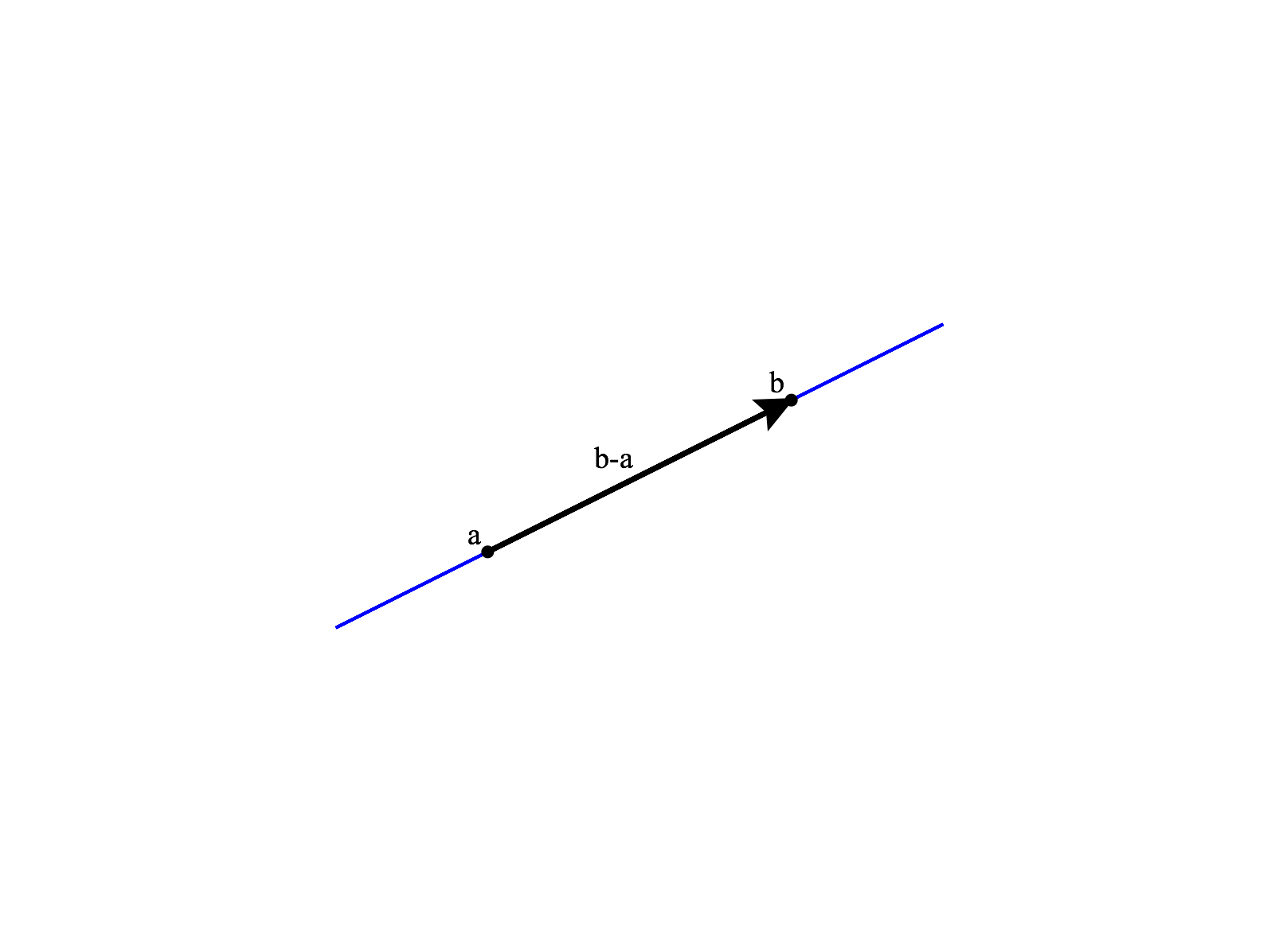
Given points and in , we obtain a vector starting at and ending at by taking . This vector is parallel to the line through and . Then, taking scalar multiples for , we have a line parallel to the line through and . Finally, we add one of the points, , to ensure that our line passes through these two points. Thus, we arrive at our parametrization,
Recall the parametrization for the unit circle in ,
Now, consider the ellipse below.
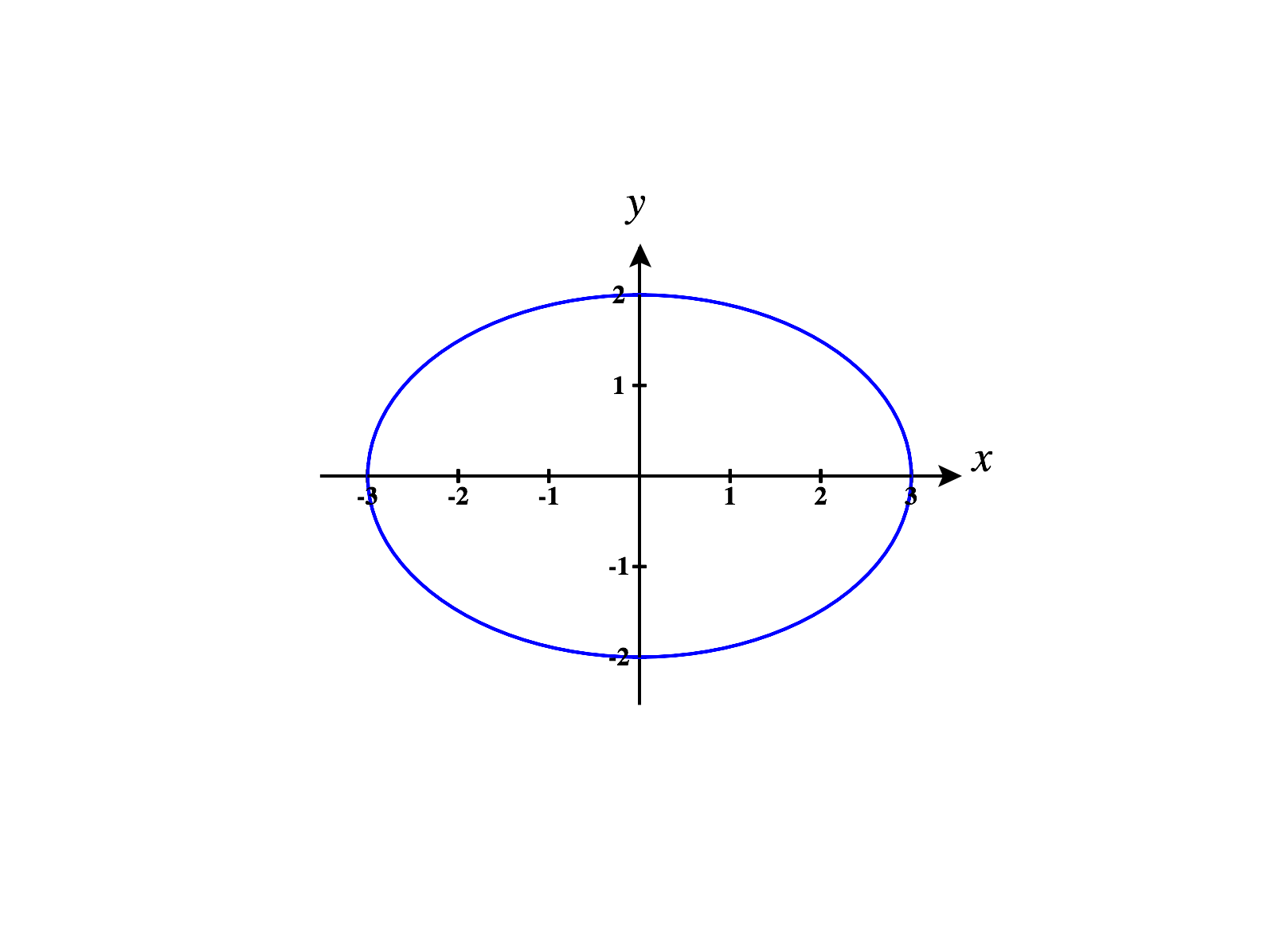
We can think of this ellipse as the result of stretching the unit circle horizontally by a factor of and vertically by a factor of . That is, we are applying the linear transformation We can apply this to the parametrization for the unit circle, in order to parametrization for the ellipse.
Thus, we have a parametrization for the ellipse given by
Next, consider the following ellipse.
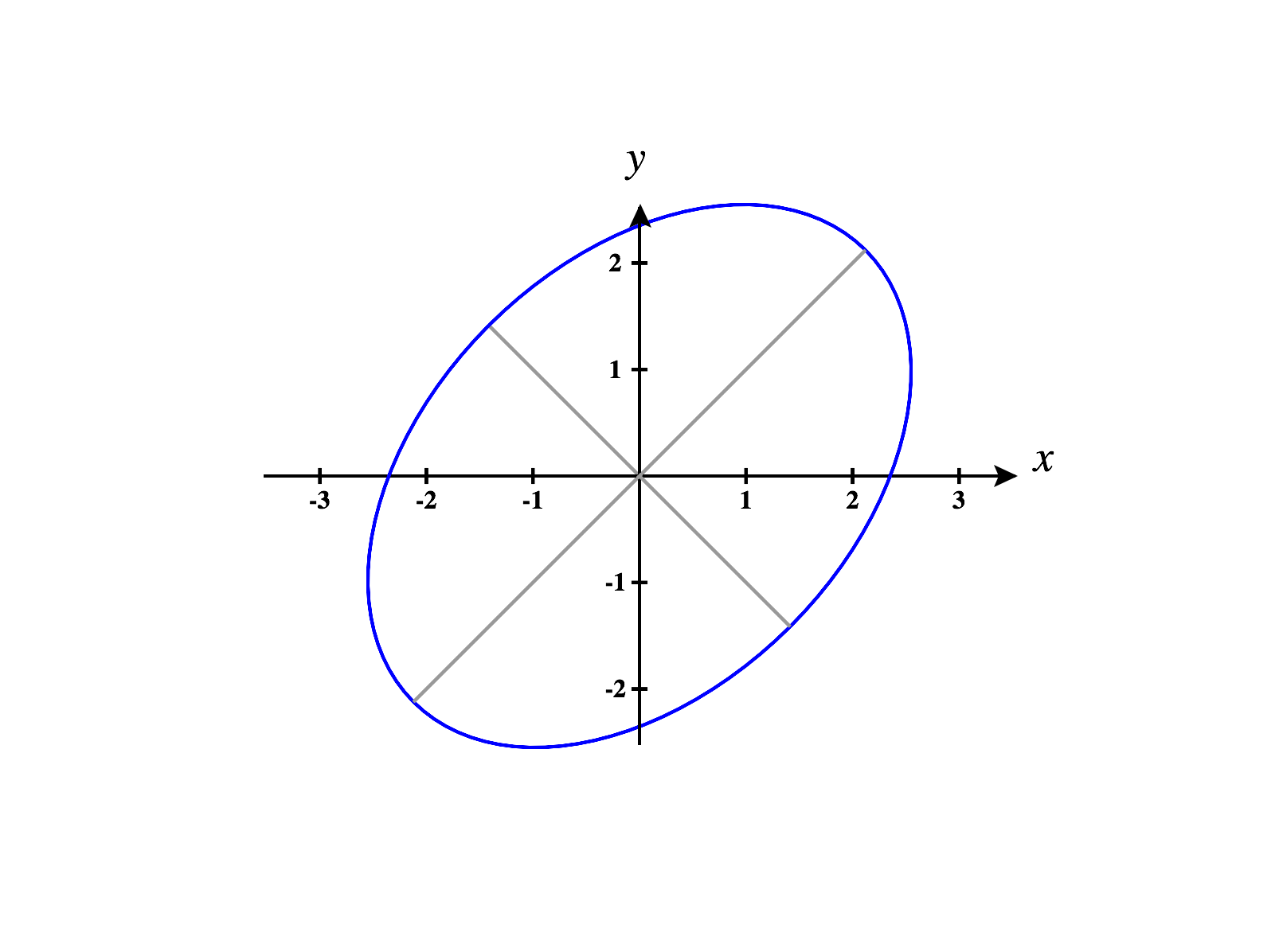
We can obtain this from our previous ellipse by counterclockwise rotation of . The matrix for this linear transformation is Applying this rotation to our parametrization for the previous ellipse, we obtain a parametrization for our new ellipse.
Finally, we consider an ellipse in , shown below.
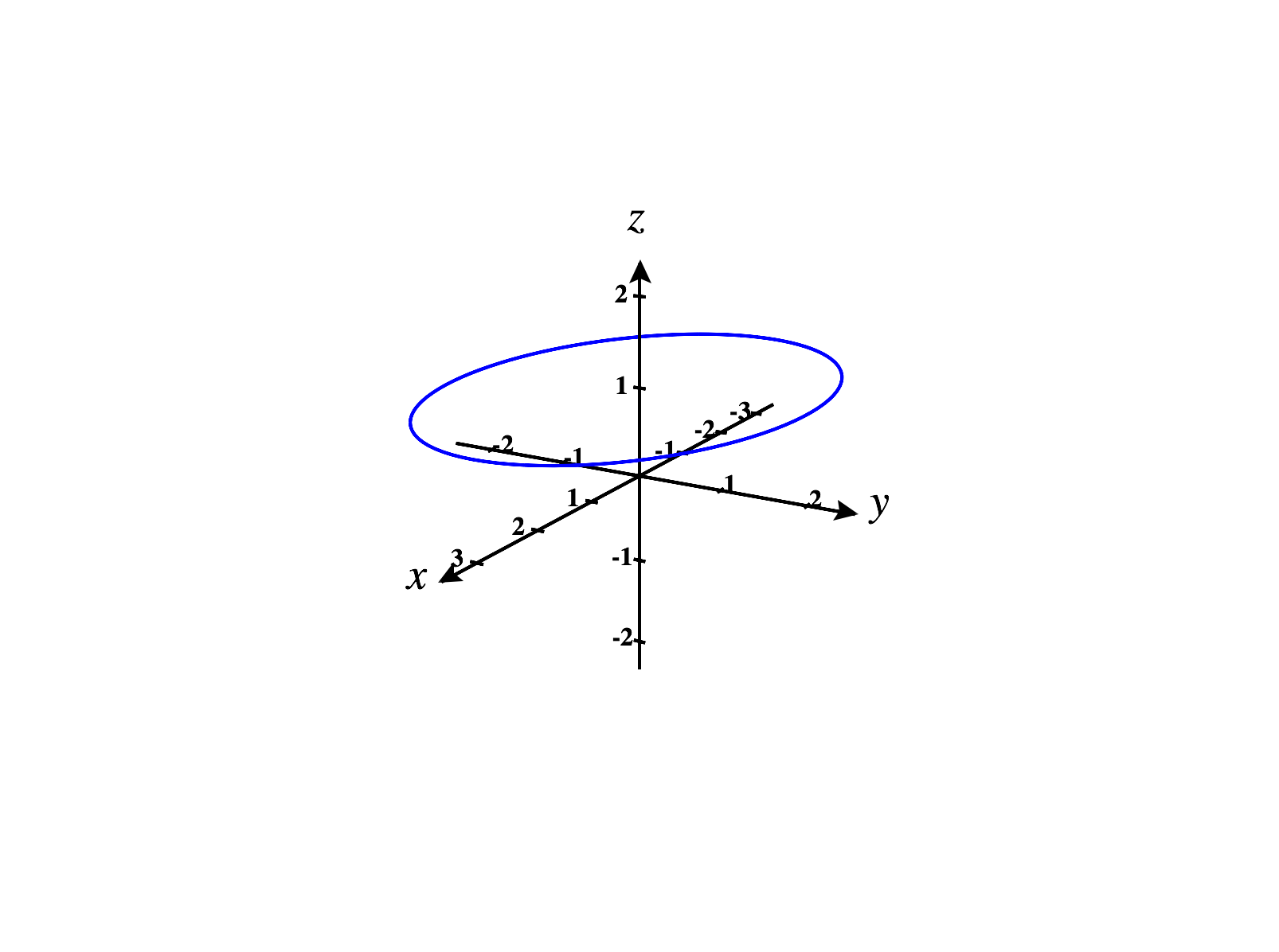
This ellipse is parallel to the -plane, and will have constant -coordinate of . Note the similarity to the first ellipse we considered. A parametrization for this ellipse can be obtained by taking the parametrization for our first ellipse in , and appending the constant -coordinate.
Examples in
In this section, we give examples of parametrizations of a couple of more complicated curves in , taking advantage of our previous experience with cylindrical coordinates.
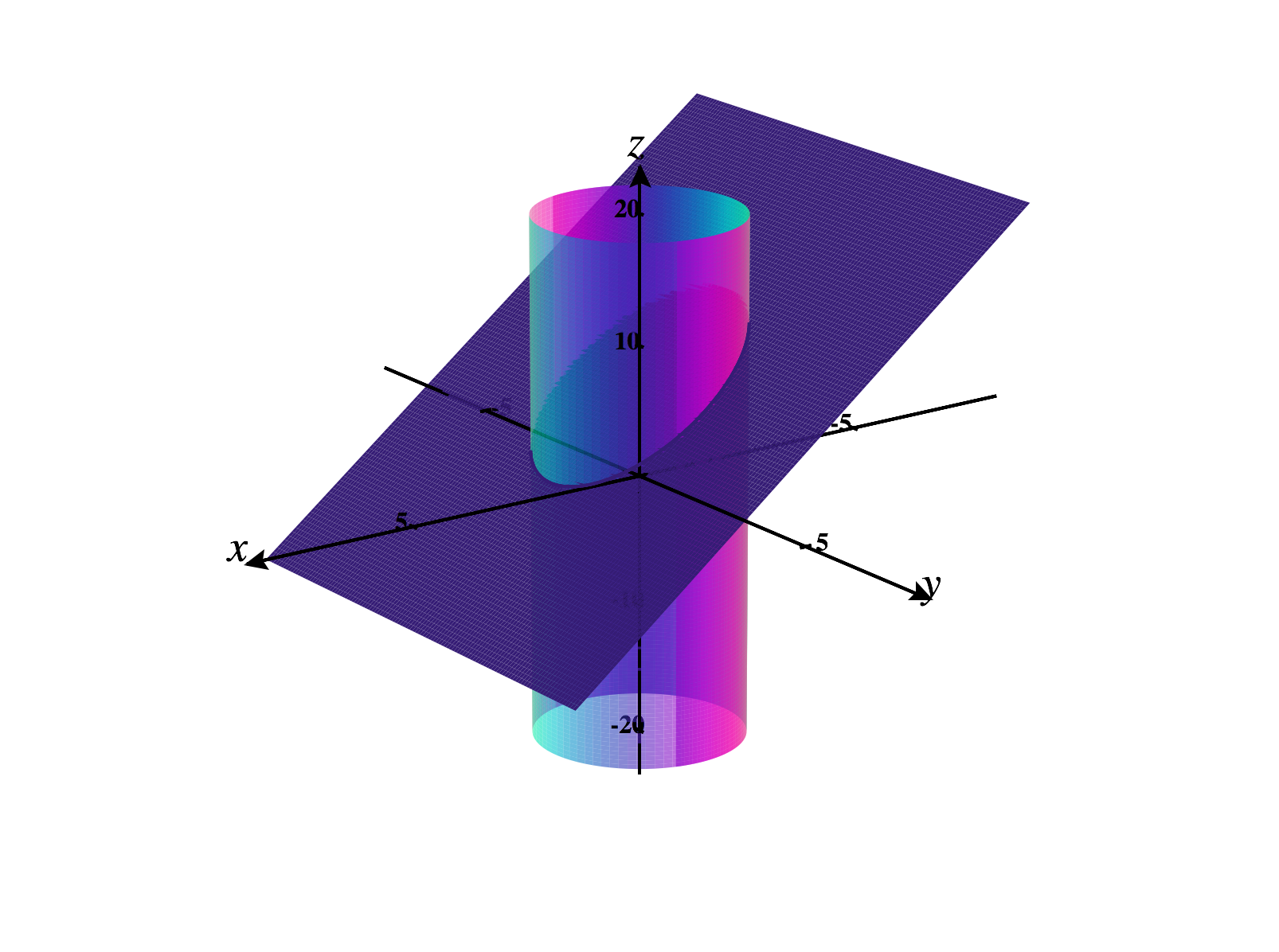
Our and coordinates must satisfy , which would define a circle, if we were in . Recalling our parametrizations for circles, these coordinates can be written as
for .
It remains to write the -coordinate in terms of the parameter . Turning our attention to the equation for the plane, , we have expressed in terms of . Since we have expressed in terms of , we can make this substitution to describe in terms of ,
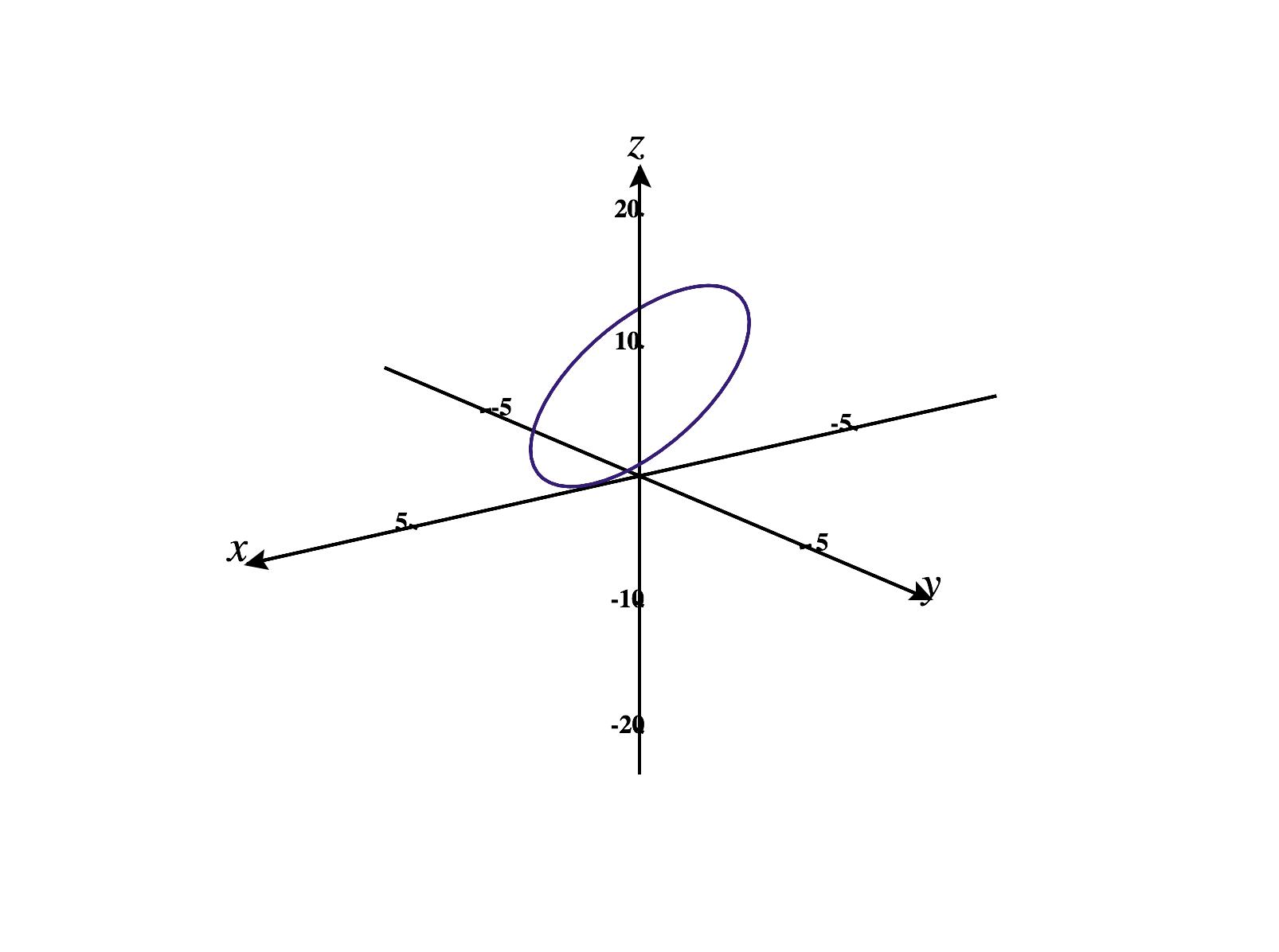
Putting all of this together, we have a parametrization for this intersection given by
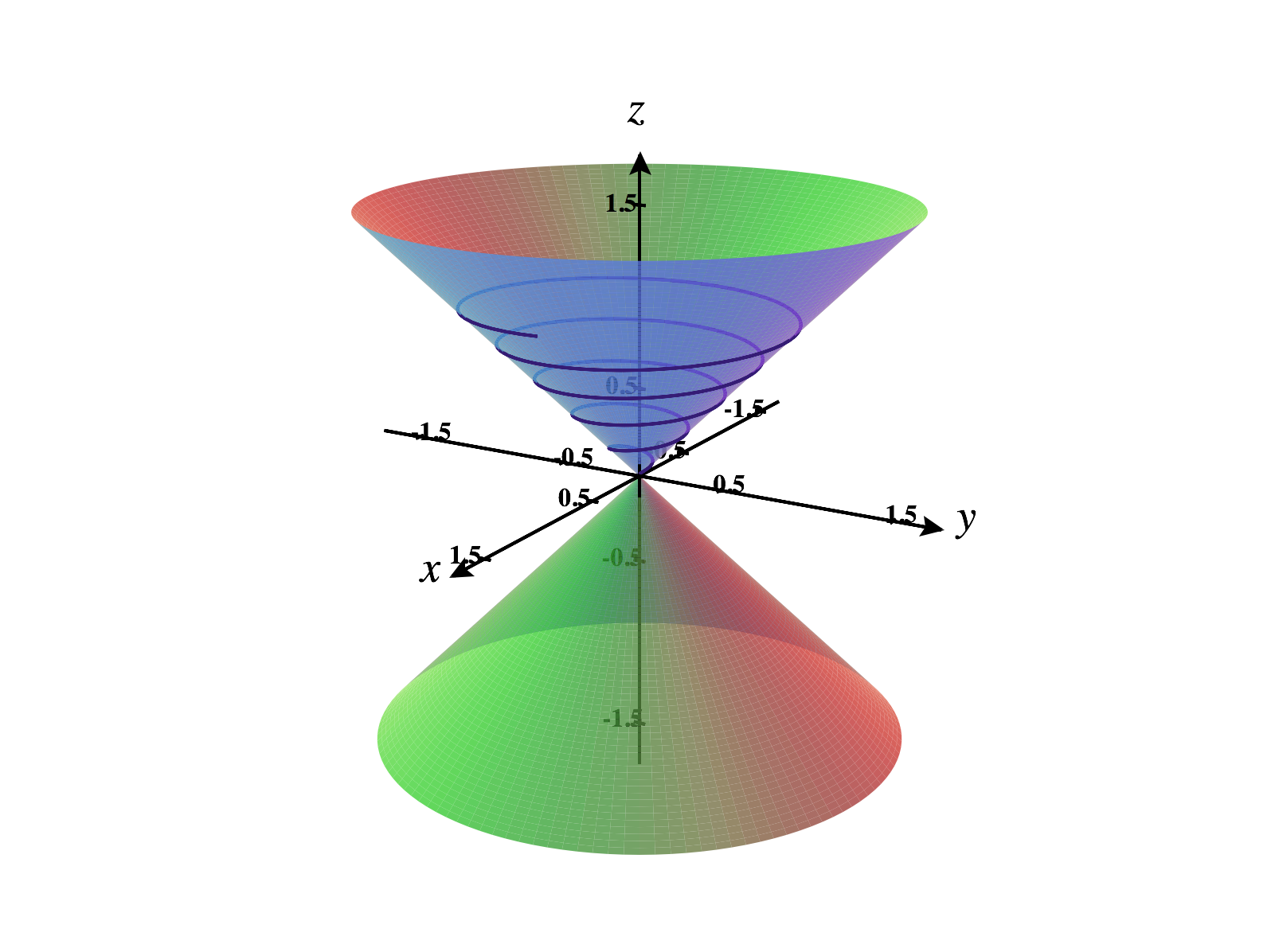
We’ll parametrize this curve by thinking about it in cylindrical coordinates, using the height as the parameter.
First, let’s consider what’s happening with the -coordinate. Since the height of the tornado rangers from to , so will . We’ll set , with , and express and in terms of as well.
Now, we turn our attention to the angle . As the height ranges from to , the tornado makes five revolutions, so should range from to . Thus, expressing in terms of , we let .
Next, we consider the radius . Since we are on the cone , we have . Since , we have . Thus, we can write in terms of as .
Finally, putting all of this together with and , we have a parametrization for the tornado given by
Images were generated using CalcPlot3D.