You are about to erase your work on this activity. Are you sure you want to do this?
Updated Version Available
There is an updated version of this activity. If you update to the most recent version of this activity, then your current progress on this activity will be erased. Regardless, your record of completion will remain. How would you like to proceed?
Mathematical Expression Editor
We find standard matrices for classic transformations of the plane such as scalings,
shears, rotations and reflections.
LTR-0070: Geometric Transformations of the Plane
Digital image manipulation apps continue to increase in popularity. To manipulate a
digital image, we treat every pixel of the image as a point or a vector in . A
transformation is applied to each pixel, and the output pixel is colored the same
color as the input pixel. The figure below shows the result of a non-linear
transformation.
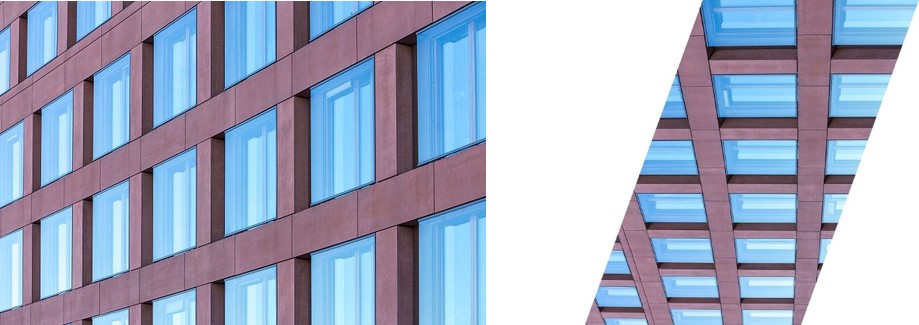
Many familiar transformations, such as rotations, reflections and shears, are linear.
Every pixel of a digital image is treated as a vector . To perform a linear
transformation, we multiply the vector by a matrix. The figure below shows the
result of a linear transformation applied to the photo of a building. Linear
transformations keep the origin fixed, and map lines to lines. (See Practice Problem
prob:linestolines)
We now consider several basic linear transformations and the standard matrices
associated with them. The key concept is that if we want to understand what a linear
transformation does, it is enough to understand what it does to basis vectors, such as
standard basis vectors and . Caution: we can get into trouble if we try to construct a
standard matrix for a non-linear transformation by tracking images of and , as you
will see in one of the Practice Problems!
Horizontal and Vertical Scaling
Let us attempt to find the standard matrix of a transformation that stretches an
image vertically by a factor of 2, as shown in the figure below.
Assuming that this transformation is linear, we need to find what the transformation
does to the standard basis vectors. Once we have a candidate for the standard matrix,
we will test it to make sure it accomplishes the stretch.
Consider what this transformation does to the standard unit vectors. We observe
that and . This allows us to construct a candidate for the standard matrix , by
making the images of and the columns of . Thus,
We can now check to see what this matrix does to an arbitrary point . Treating this
point as a vector , we compute
Thus, this transformation takes point to point . So, the proposed transformation
doubles all -coordinates resulting in a vertical stretch by a factor of 2.
In general, a vertical stretch (or compression) leaves unchanged, and scales the
vector while preserving its vertical direction. Thus, a vertical stretch (or
compression) maps to , and maps to for some positive number . Similarly, a
horizontal stretch (or compression) maps to , and maps to .
Horizontal and Vertical Scaling
A linear transformation that scales objects in the plane vertically by a factor of () is
induced by
A linear transformation that scales objects in the plane horizontally by a factor of ()
is induced by
In stating the above formula we stipulated that . If we were to allow to be
zero, what would the resulting transformations accomplish? In what way
would the resulting matrices be fundamentally different from matrices and ?
What would happen if were allowed to be negative? (See Practice Problem
prob:k0)
Horizontal and Vertical Shears
A horizontal shear is a transformation that takes an arbitrary point and maps it to
the point . The effect of this transformation is that all points along a fixed horizontal
line slide to the left or to the right by a fixed amount. Note that the higher the point
is above the -axis, the greater is the magnitude of , resulting in a greater amount of
horizontal slide.
Adding a scalar multiple of the component to the component can be accomplished
by matrix multiplication. Observe that
A vertical shear is a transformation that takes an arbitrary point and maps it to the
point . This too, can be accomplished by matrix multiplication.
Because both types of shears are induced by matrices, horizontal and vertical shears
are linear transformations.
Horizontal and Vertical Shears
A linear transformation that shears the plane horizontally is induced by
A linear transformation that shears the plane vertically is induced by
Find the standard matrix of a linear transformation that shears the image of a
seagull as shown in the figure below.
Consider what this transformation does to the standard unit vectors.
The tip of the vector slides up a vertical line and its -component remains the same.
Vector stays fixed. We observe that and . This allows us to construct , by making
the images of and the columns of . Thus,
Rotations about the Origin
Recall that to prove that a transformation is linear, we have to show that for all
vectors and and scalars and we have
We are used to going through this verification algebraically. In some situations,
however, it is instructive to think about this property geometrically. Consider a
transformation that rotates every point in the plane counter-clockwise through angle
about the origin. Is a linear transformation?
The figure below illustrates the left-hand side of Equation eq:rotlintrans. Scalar multiples of
and are added in the domain, then the sum is rotated through angle by
.
The next figure illustrates the right-hand side of Equation eq:rotlintrans. First, vectors
and are rotated through angle , then their images are scaled and added
together.
Because the diagonal of a parallelogram rotates with the parallelogram, it is clear
that
So, intuition tells us that is linear.
Before we consider the general standard matrix of , let’s take a look at a specific
example.
Find the standard matrix of a linear transformation that rotates the image by
counterclockwise.
Consider the action of on the standard unit vectors.
We observe that and . This allows us to construct the matrix , by making the images
of and the columns of . Thus,
In general, we find the standard rotation matrix by determining the images of vectors
and .
Counterclockwise Rotation A linear transformation that rotates the plane
counterclockwise through angle about the origin is induced by
Reflections about Lines of the Form
When a point is reflected about a line, its image is located on the opposite
side of the line and the same distance away from the line as the original
point.
For example, the figure below shows the reflection of point about line . Note that the
reflection lies on a line through perpendicular to .
Arguing in a manner similar to our discussion of linearity of rotations, we can see
that reflections are also linear. Our task is to find the matrix of a reflection of the
plane about an arbitrary line through the origin.
In this problem we will find the standard matrix for the reflection about the and
axes. You can easily do this on your own by finding the images of vectors and
.
We will start with the reflection about the -axis.
So, the standard matrix that induces the reflection about the -axis is
Next, we will consider the reflection about the -axis.
Thus, the standard matrix that induces the reflection about the -axis is
Now we will turn our attention to transformations that reflect the plane about the
line . We will assume that .
Consider the vector and its reflection.
Observe that the head of the image vector, , will lie on the line that passes
through and is perpendicular to the line . The equation of this line is given
by
The head of will also lie on the circle with equation
To find the image of we need to determine where the line intersects the circle.
Substitution gives us
After a little algebra we get
The quadratic formula yields
The solution corresponds to the head of the vector . So, the -component of is . We
find the -component of by substituting into Equation eq:reflectionline.
Thus, the image of under this reflection is given by
Next we need to find the image of . The head of is located at one of the intersections
of line and the circle .
We leave it to the reader to verify that
The standard matrix of this reflection is then given by
Reflection about the line
A linear transformation that reflects the plane about the line is induced by
Find the standard matrix of a linear transformation that reflects the image of the
duck about the line .
Note that the eye of the duck in Example ex:reflectedduck is located on the line . The reflection
leaves the eye fixed in place. The eye is an example of a fixed point. In Practice
Problem prob:fixedpoint you will be asked to show that every point along the line is a fixed
point.
Composition of Linear Transformations
If a linear transformation is followed by another linear transformation, the resulting
transformation can be represented by a product of the two matrices that induce the
individual transformations. Thus, if is induced by and is induced by , then is
induced by .
Remember that matrix multiplication is not commutative, so the order in which the
matrices are multiplied is of utmost importance.
In this problem we will consider compositions of two reflections and use geometry to
illustrate non-commutativity of matrix multiplication. Let
be a reflection about the line . Let
be a reflection about the line . We will denote the standard matrices for these
transformations by and , and use geometry to demonstrate that .
To do this, consider transformations and . Transformation is induced by , and is
induced by .
The figure on the left illustrates the action of on a single point . First, is reflected
about the line , then is reflected about the line .
The figure on the right shows the action of on the same point . The point is first
reflected about the line , followed by a reflection about the line . The final images of
point under and are clearly different.
Since , we conclude that .
Some pairs of matrices do commute. For example, geometry makes it is easy to see
that two rotation matrices commute.
Inverse of a Linear Transformation
Recall that two linear transformations are inverses of each other if their composition
is the identity transformation. If a linear transformation induced by the matrix is
invertible, then is induced by .
Geometry can help find the inverse of certain matrices. For example, we can easily
see that the inverse of the rotation transformation with standard matrix has the
inverse with standard matrix .
If we were to allow to be zero, what would the resulting transformations
accomplish?
(b)
In what way would the resulting matrices be fundamentally different from
matrices and ?
(c)
Do and have inverses? What about and ?
(d)
What would happen if we allowed to be negative?
Find the standard matrix of a linear transformation that would double the length of
a photo horizontally, and triple the height of the photo.
(Sheared Sheep) Find the standard matrix of the linear transformation shown in the
figure.
In the beginning of this module we claimed that linear transformations leave the
origin fixed and map lines to lines. Prove this claim.
Suppose a 1 by 1 photo of a chipmunk was shifted as shown in the figure.
Suppose we tried to construct a standard matrix for this transformation by making
the images of and the columns of . We would obtain
Does this matrix describe the transformation? If so, prove it. If not, explain why
not.
A transformation that shifts all points in the plane horizontally or vertically by a
fixed amount is called a translation. Is a linear transformation? Prove your
claim.
A reflection about the line followed by another reflection about the same line,
amounts to the identity transformation. Prove this using matrix multiplication.
Prove that every point along the line in Example ex:reflectedduck is a fixed point.
The figure below shows a sequence of two linear transformations that accomplishes a
reflection about the line . The first transformation is a reflection of the plane about
the -axis. The second transformation is a rotation of the plane about the
origin. Find the standard matrices for the two transformations and verify
that their product (in the correct order) is the reflection matrix of Example
ex:reflectedduck.